| Rossum | Papers | |
 |
Simulator | FAQ | Downloads | ||||
| Papers, RFC's, and Proposals |
This page is provided for robotics enthusiasts who wish to post requests
for comments or solicitations for information to other members of the robotics community.
Some of work referenced here is associated with the Rossum Project. Other material has
been selected because it is relevant to work currently being conducted for the Project.
If you are looking for general information about robotics -- including tutorials,
algorithms, and technical data -- visit the Seattle Robotics Society's web site
(click here).
Their on-line publication, the Encoder, features articles on a variety of topics, and is
probably the best on-line resource for robotics information on the planet
(click here for the Encoder).
|
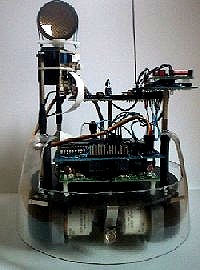
The author gives a short description of a localization and exploration algorithm
that he has implemented on a very impressive robot. The robot, which is based
on a highly modified Rug Warrior base, uses a number of sensors, most notably a
Polaroid sonar range sensor mounted on a servo motor to provide a 180 degree
sweep. An RF link permits it to communicate with a
PC which performs the computationally intensive navigation logic.
Although the algorithm development is not complete, preliminary results are shown in a number of graphics and screen captures. An assortment of useful links to original papers for the algorithms and manufactures for the hardware used in its embodiment are supplied. |
|
 | |
| Link to An Implementation of an Algorithm for... |
The author discusses search strategies used by the Auto-Pilot Demo supplied with the RP1 robot simulator. The demo derives an optimal strategy for the Trinity College Fire-Fighting Home Robot Contest. In the contest, a small robot explores a miniature house seeking a lighted candle (the "Fire"). The search is optimized based on the time required to traverse between rooms weighted by the probability that the target will be found in each.
The Auto-Pilot demo also illustrates a feature of the RP1 simulator which allows an application to download information about the virtual environment in which a robot is to operate. For this demo, the floor plan included a navigation network, a series of "roads and intersections" which allow the simulated robot to plan its search. Because the optimization logic is based on data obtained at run time, it could be used for applications other than the contest.
Link to
Search Strategies for the Fire-Fighting Robot Contest
An Elementary Model for the Differential Steering
System of Robot Actuators
Author: G.W. Lucas gwlucas@users.sourceforge.net
Listed: 11 May 2000
This paper presents a model for the differential steering system, a simple and reliable wheel-based propulsion system that is commonly used in small robots. Differential steering is essentially the system that used in wheelchairs, and the author draws on an intuitive unstanding of this familiar concept to develop equations describing its motion. A model predicting the path for specific input values (wheel speeds) is presented. The author also discusses the implementation of dead reckoning (navigation) logic for such systems. The paper takes a simplified (kinematics) approach to the problem, leaving the more challenging dynamics approach for a future discussion.
The intended audience for this web page includes high school and undergraduate students who may not be comfortable with the calculus techniques used to develop the differential steering model. The paper suggests that such students may "parse out" the relevant information and points out the equations that may be of most use to them.
Link to
An Elementary Model for the Differential Steering System of Robot Actuators
Using a PID-based Technique for Competitive Odometry and Dead Reckoning
Author: G.W. Lucas gwlucas@users.sourceforge.net
Listed: 26 June 2002
| This paper describes how a PID-based controller
was used to control a differential steering system for a small mobile robot.
The technique was successful in a dead-reckoning competition conducted by the
Connecticut Robotics Society. The article includes a brief introduction to the
PID technique and offers basic equations
for performing PID calculations in a differential steering system using integer math.
It provides an example of how the right algorithm can offer surprisingly good results
on modest hardware... in this case, a Lego Mindstorms construction named Peeves.
Finally, it provides a practical discussion of dead reckoning in a
differential steering system. URL's for PID tutorials as well as software resources for the Mindstorms system are also included. |
Link to Using a
PID-Based Technique for Competitive Odometry and Dead Reckoning
Report: Steering Behaviors for Autonomous Characters
Author: Craig W. Reynolds cwr@red.com
Listed: 25 August 1999
| Although the field of computer animations and games may seem unrelated to robotics, this paper addresses key problems in robot navigation. The author has done work for major players in the Animation and Gaming industry. His paper is written with unusual clarity and illustrated with some nice Applet-based animations. The site also includes valuable links. The author's abstract follows: | ||
| This paper presents solutions for one requirement of autonomous characters in animation and games: the ability to navigate around their world in a life-like and improvisational manner. These "steering behaviors" are largely independent of the particulars of the character's means of locomotion. Combinations of steering behaviors can be used to achieve higher level goals (For example: get from here to there while avoiding obstacles, follow this corridor, join that group of characters...) This paper divides motion behavior into three levels. It will focus on the middle level of steering behaviors, briefly describe the lower level of locomotion, and touch lightly on the higher level of goal setting and strategy. | ||
Link to Steering Behaviors for Autonomous Characters
Calculations Useful for Robotics
Author: G.W. Lucas gwlucas@users.sourceforge.net
Listed: 26 Nov 2005
This web page presents a series of articles giving calculations that are useful for robotics. The articles discuss trajectory calculations and computations related to path-planning applications. The articles are intended for a general audience, so the methods are described in considerable detail.
Link to
Calculations Useful for Robotics
The author discusses performance tests conducted for the RP1 simulation. The tests were intended to see if the system could run fast enough to support multiple-simulation studies. A table showing relative performance of different systems is provided.
The test does not provide a rigorous benchmark, but was intended to be a fair cross-system comparison. The author professes surprise over how much better the tests ran under Linux than under Windows. He requests information about system tuning issues that might improve performance under to improve performance under Windows.
View text document speed.txt
Address inquiries to gwlucas@users.sourceforge.net
And, as always, we gratefully acknowledge the support of Sourceforge for their support.