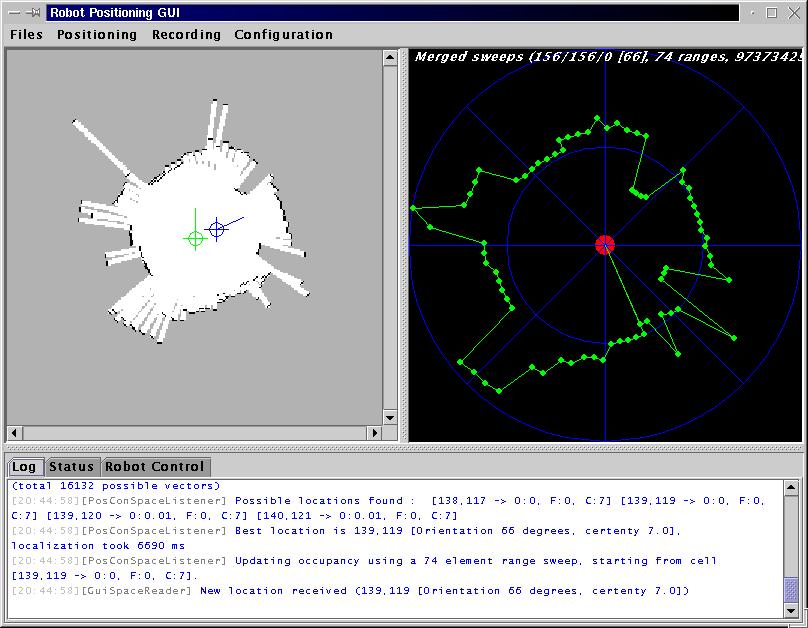
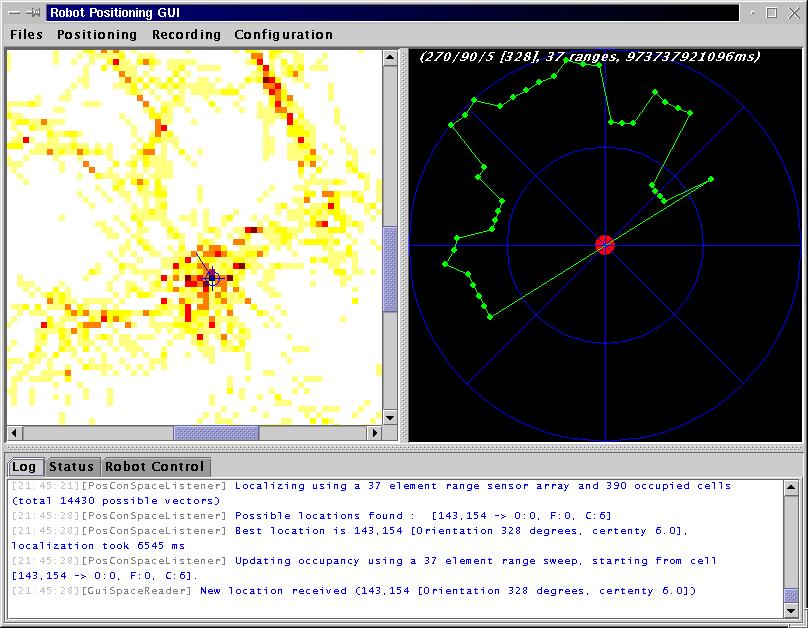
Multiple map update During this test the map was continuously updated. The first sweep was performed at position 1 (cell 125, 125) and
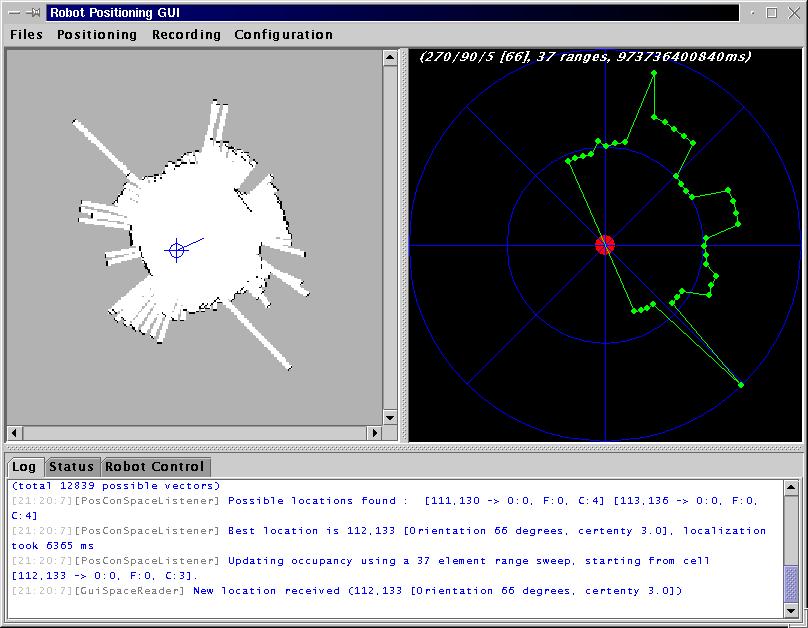
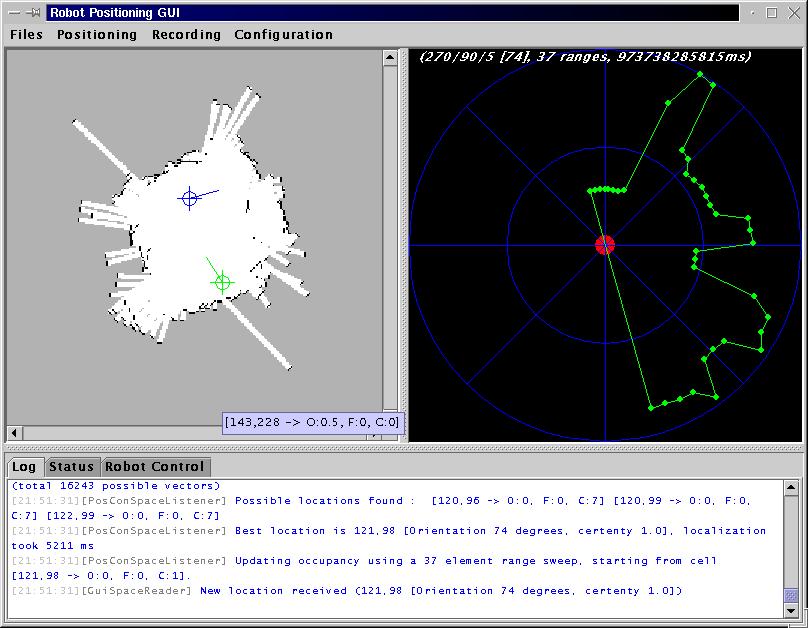
the global map was updated. When a range sensor sweep is received a localization is performed and then the map is
updated at the calculated position. The following map settings were used:
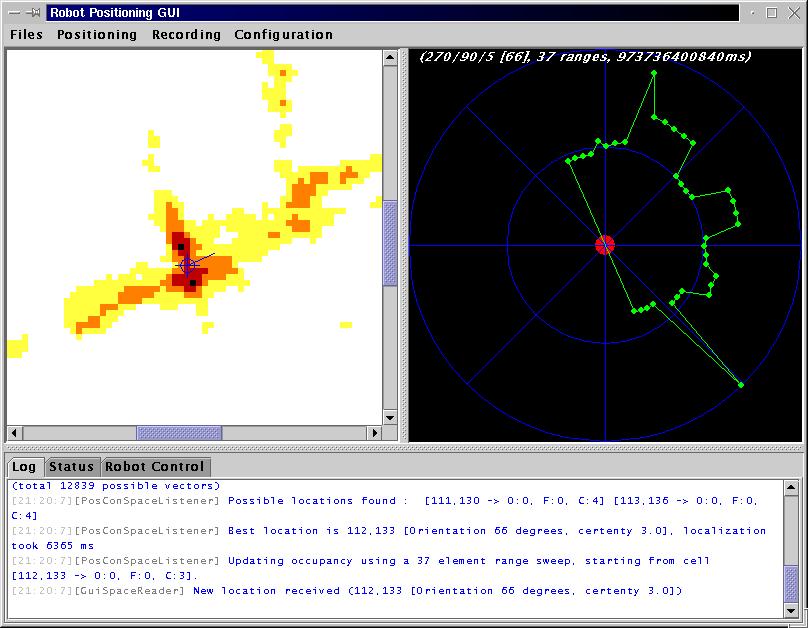
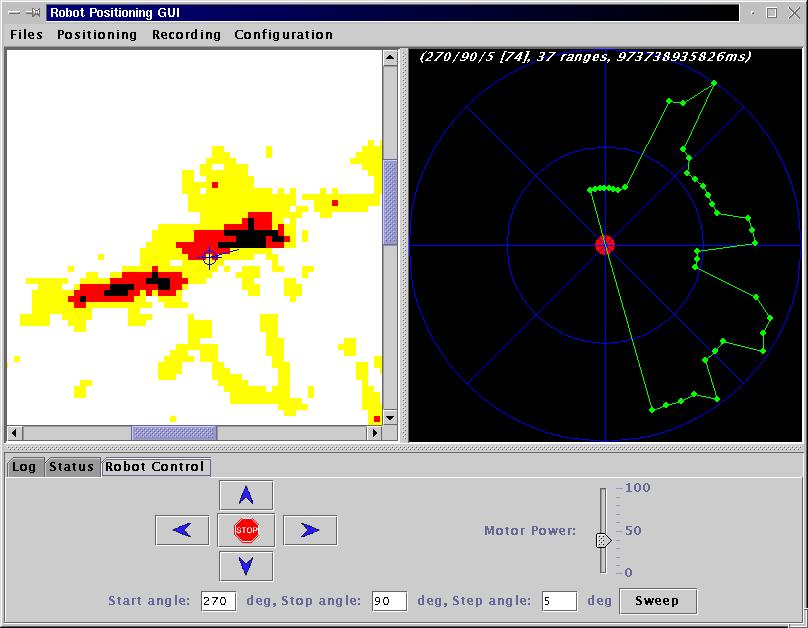
Grid map size 250 x 250 cells.
Cell physical size 2cm x 2xm
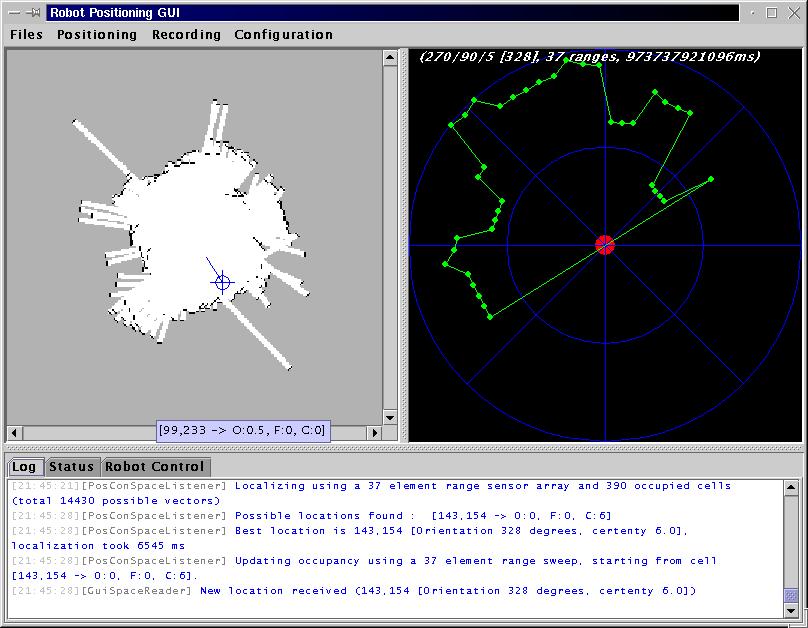
That gives us a 5m x 5m map. The following figures show the results I've got when moving the robot through
the five locations shown in the room map.