Single map update In this test a 360 degree range sweep was taken at position 1 and the global map was updated. For all other positions
only localization will be performed thus leaving the global map unaffected, the following map settings were used:
Grid map size 250 x 250 cells.
Cell physical size 4cm x 4xm
That gives us a 10m x 10m map which is more than enough for the room I am testing in. The following figures show the
results I've got when moving the robot through the five locations shown in the room map.
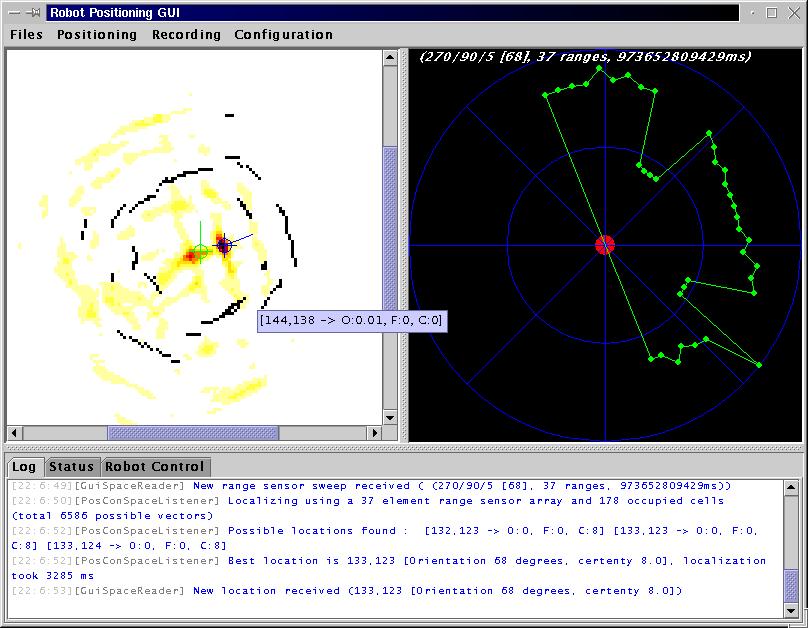
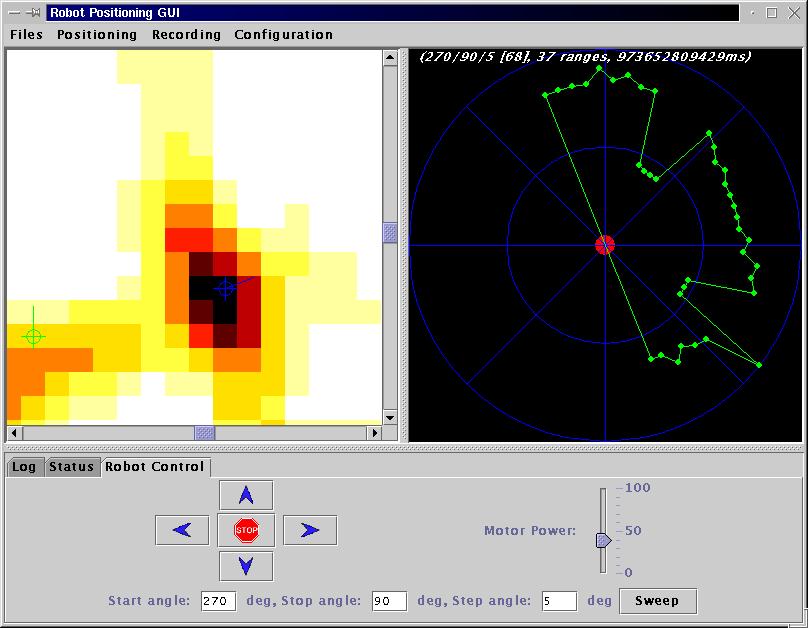
Map position : 2
Orientation : 68 degrees
Range sensor sweep : 180 degrees
Map updated : no
Calculated location : 133, 123 (33cm from Pos 1)
Location error : ~3cm (1 cell)
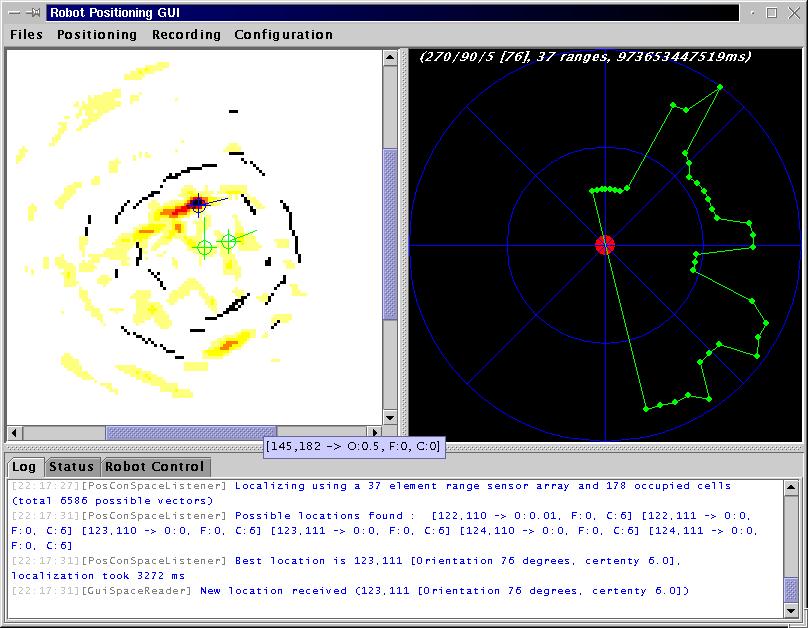
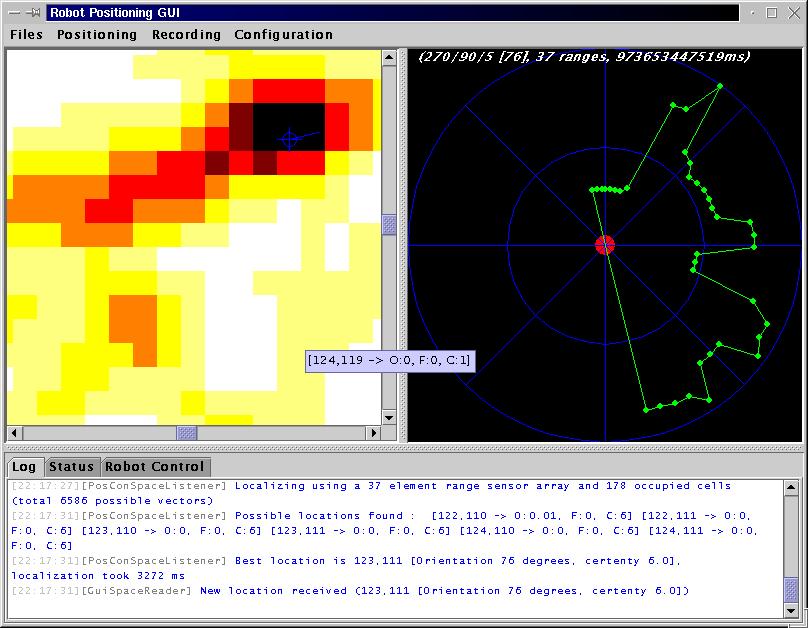
Map position : 5
Orientation : 76 degrees
Range sensor sweep : 180 degrees
Map updated : no
Calculated location : 123, 111 (57cm from Pos 1)
Location error : ~3cm (1 cell)
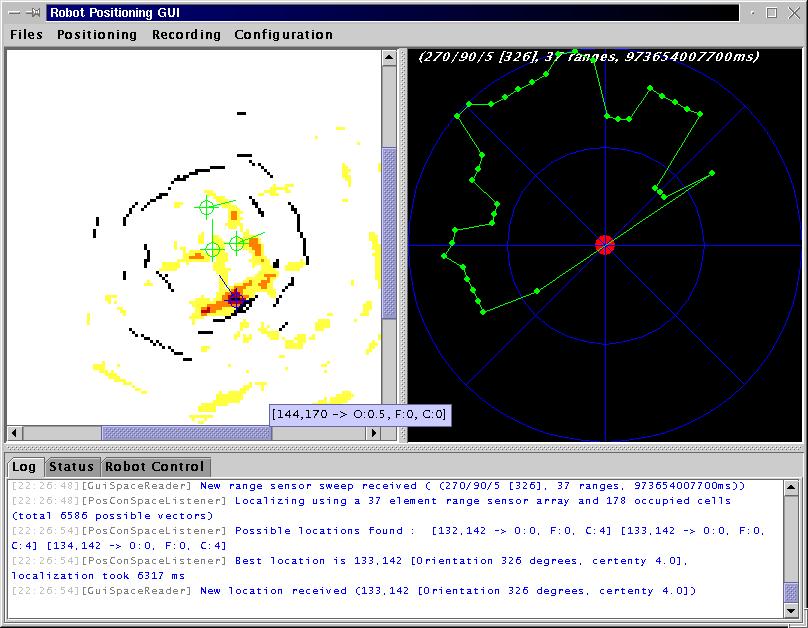
Map position : 4
Orientation : 326 degrees
Range sensor sweep : 180 degrees
Map updated : no
Calculated location : 133, 142 (75cm from Pos 1)
Location error : ~15cm (4 cells)
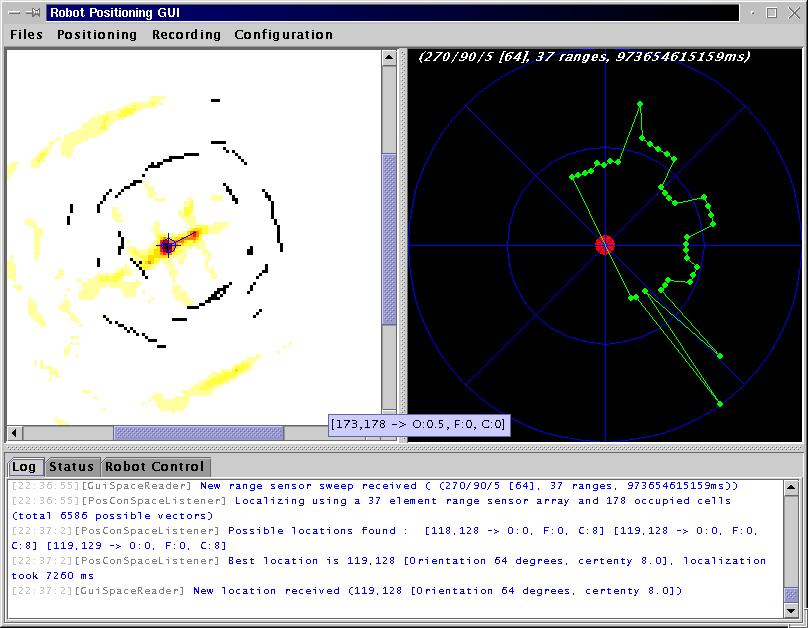
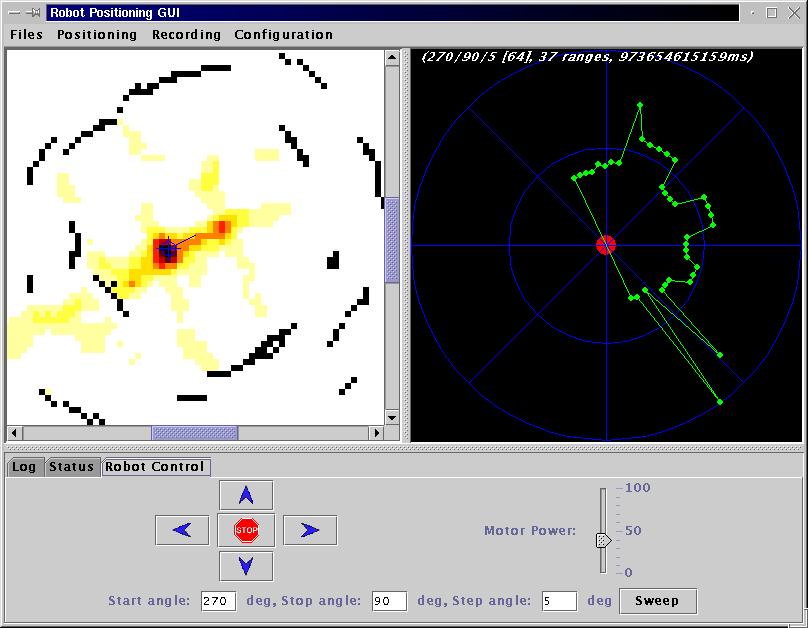
Map position : 3
Orientation : 64 degrees
Range sensor sweep : 180 degrees
Map updated : no
Calculated location : 119, 128 (27cm from Pos 1)
Location error : ~3cm (1 cell)
If you have any questions or suggestions about these pages please drop me an email Copyright Vassilis Varveropoulos
Last updated 20/11/00