| Rossum | Papers and RFC's | Localization and Exploration |
Here you will find a short description of the localization and exploration algorithm that I am working on.
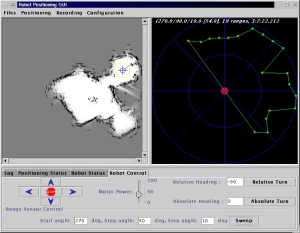
The software is by no means complete, but here you can see some of the preliminary results that I've got.
The implementation was done in Java (like the rest of my robot control software). The software
is designed to work with both my robot and the Rossum Playhouse simulator. The software bundled with the simulator is
publicly available for demonstration and experimentation purposes. Results obtained with the robot are available from
this site. I am working at this web site as part of The Rossum Project (an open-source robotics software project).
With the completed positioning software it will be possible to deploy the robot in an unknown environment,
and have it autonomously explore and map the floorplan.
To find out more
To find out more about localization algorithms, my investigations, and the robotic test platform I built to explore the problem, please visit any of the following pages:
If you have questions about my work on Localization algorithms, my test robots, or
the POS application,
you may reach me at vassilis@users.sourceforge.net.
This page is under construction so some parts may be missing or incomplete.